Sensori
I sensori raccolgono le informazioni dall'ambiente e le trasmettono al "cervello" del robot. Senza i sensori, il robot non è in grado di interagire con l'ambiente in cui si trova.
SENSORI DI CONTATTO
: chiudono un contatto quando toccano (o urtano) un oggetto. Il tipo più semplice è costituito da un interruttore fine-corsa a cui è fissato un "baffo" metallico. Si possono facilmente autocostruire.
Un sensore di contatto è costituito da un pulsante che chiude il circuito quando il robot urta un ostacolo. Il pulsante può chiudere il circuito verso il positivo di alimentazione o verso massa:
Quando si collega il pulsante a una porta logica (NAND, OR, Inverter, ecc.) bisogna aggiungere una resistenza di pull-down (o pull-up) così da forzare l'ingresso a massa (o al positivo) quando il pulsante è aperto.
In parallelo al sensore di contatto si può collegare un condensatore elettrolitico, per creare un "effetto ritardo" quando il pulsante si apre:
SENSORI DI LUCE
: sono sensibili alle variazioni luminose (fotodiodo, fototransistor, fotoresistenza). La fotoresistenza (LDR) varia il proprio valore ohmico in funzione della luce, con un'escursione che può andare da alcune centinaia di Kohm (buio) a qualche centinaio di Ohm (piena luce).
Il circuito seguente utilizza una fotoresistenza (LDR) come sensore di luce. In uscita si ha un livello logico 0 quando la fotoresistenza viene illuminata. Per invertire i livelli logici, scambiare LDR/R1 con R2.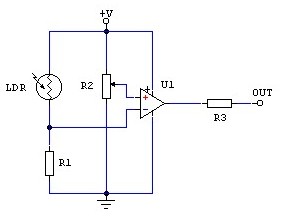
COMPONENTI: R1 (10k), R2 (trimmer 47k), R3 (1k), U1 (741), LDR (fotoresistenza).
Schema di un altro circuito che utilizza come sensore di luce una fotoresistenza: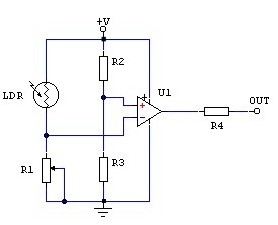
COMPONENTI: LDR (fotoresistenza), R1 (trimmer 47k), R2 (10k), R3 (10k), U1 (741), R4 (1k).
Il circuito seguente utilizza come sensore di luce un fototransistor (Q1). In uscita si ha un livello logico 1 quando il fototransistor è illuminato. Per invertire i livelli logici, scambiare Q1/R1 con R2.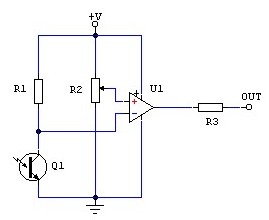
COMPONENTI: Q1 (fototransistor), R1 (10K), R2 (trimmer 47k), R3 (1k), U1 (741).
Ecco una variante. Il potenziometro da 1M regola la sensibilità:
Quando si utilizzano fototransistor/fotodiodi con gli infrarossi, è bene ricordare che questi componenti presentano una certa sensibilità anche per la luce visibile.
| TIPO | SENSIBILITA SPETTRALE (nm) |
| SFH205 | 800 - 1100 |
| SFH309 | 730 - 1120 |
| BPW40 | 520 - 950 |
| BPW41 | 820 - 1040 |
I due circuiti che seguono funzionano come convertitori corrente-tensione (vedi). Nel circuito con l'operazionale, la resistenza va calcolata applicando la formula V(out) = (Kohm x microA):1000, dove microA è la corrente che scorre nel fototransistor colpito dalla luce (vedi il datasheet). Usare operazionali LM358 - LM324:
SENSORI DI PROSSIMITÀ
: trasmettono un'informazione prima che il robot tocchi l'ostacolo. Funzionano sul principio del radar o del sonar: il trasmettitore invia un impulso (ottico o sonoro) che rimbalza contro l'eventuale ostacolo e viene ricevuto dal robot. Si possono realizzare sensori di prossimità a ultrasuoni o a infrarossi (IR).
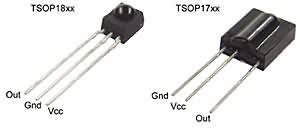
Sensori Vishay Telefunken CNY70, TCRT 1000 e 5000, TSOPxxxx
SENSORI DI TEMPERATURA
: il tipo più semplice è costituito da una resistenza NTC (Negative Temperature Cohefficient) che varia il proprio valore ohmico in funzione della temperatura.
SENSORI MAGNETICI
: sono costituiti da un'ampolla di vetro contenente due lamelle: in prossimità di un campo magnetico le lamelle si attraggono chiudendo il circuito (relè reed).
SENSORI DI INCLINAZIONE
: aprono il circuito quando l'inclinazione del robot supera un certo valore (o quando il robot è capovolto).
SENSORI DI COLORE
: i sensori di colore funzionano sul principio della scomposizione del bianco nei tre colori fondamentali (rosso, verde e blu).
SENSORE DI SUPERFICIE "DEL TERZO TIPO"
Il sensore di superficie (floor sensor) viene utilizzato per rilevare lo stato della superficie su cui opera il robot. Più comunemente, segnala al robot la presenza di buche, dislivelli nel terreno, gradini, ecc. A scuola, dove le dimostrazioni avvengono solitamente sulla cattedra o su banchi di laboratorio, un sensore di superficie può essere utile per evitare che il robot finisca giù dal tavolo... Nei robot line following, il sensore di superficie serve invece per rilevare la linea (bianca, nera o colorata) che costituisce la guida del robot e quindi fornisce informazioni sulla luminosità del terreno o sulla sua colorazione.
Naturalmente il sensore di superficie viene montato nella parte inferiore del robot: frontalmente e sui lati oppure, nel caso di line following, in posizione centrale e rivolto verso il basso.
Il modo più semplice per realizzare un sensore di superficie consiste nell'utilizzare una fotoresistenza in un partitore di sensore come nello schema che segue:
In uscita otterremo una tensione positiva che sarà proporzionale alla luminosità della LDR, secondo la formula:
Vout = +V * [R / (LDR + R)]
Questo sensore presenta l'inconveniente di essere fortemente influenzato dalla capacità riflettente della superficie su cui il robot lavora, il che non permette di stabilire a priori il valore della resistenza R. Il problema può essere risolto sostituendo R con un trimmer, che però deve essere tarato ogni volta che si cambia superficie, il che non è l'ideale se si vuole realizzare un robot autonomo!
Per rendere il sensore indipendente dalla luminosità ambientale si può istallare vicino alla LDR (o al fotodiodo) una sorgente luminosa, come ad es. un diodo LED ad alta luminosità. Questi LED, esternamente trasparenti, forniscono una luce rossastra ad alta intensità, ma ne esistono anche tipi a luce bianca.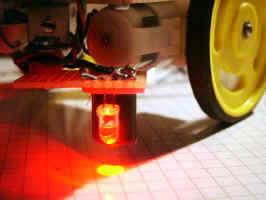
In questo modo, la fotoresistenza viene "tarata" sulla luce del diodo riflessa dalla superficie e il sensore rimane più o meno immune alla luminosità dell'ambiente, che risulta più debole:
I sensori a riflessione commerciali funzionano su questo principio, ma la sorgente luminosa è sostituita da un LED infrarosso, e la fotoresistenza da un fototransistor: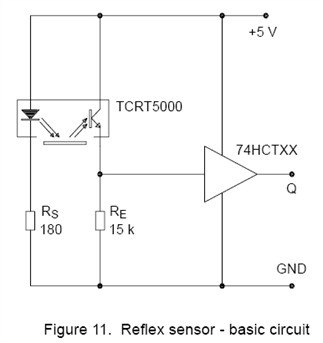
Tuttavia anche questi sensori hanno dei limiti. Innanzitutto la "portata" dichiarata è di pochi mm. Un aumento della sensibilità (e quindi della distanza) costituisce un fattore negativo, in quanto rende il sensore più vulnerabile ai disturbi e alle fonti luminose. Una forte luce ambientale può saturare il fototransistor, rendendolo cieco al segnale riflesso. Inoltre non tutti i materiali riflettono il raggio luminoso nello stesso modo.
È possibile rimediare a questi difetti utilizzando un circuito "del terzo tipo":
Come si vede, ciascun sensore è composto da due fotoresistenze che costituiscono un partitore di tensione. Quando la luce che colpisce le due LDR è uguale, all'uscita del partitore avremo una tensione di ca. 2,5V (= metà della tensione di alimentazione). Questo fatto si verifica in ogni condizione luminosa, per cui possiamo dire che il partitore di tensione è insensibile alle variazioni di luminosità. Quando, al contrario, una delle due fotoresistenze riceve meno luce, il partitore di tensione diventerà più positivo o più negativo. Il trimmer sull'ingresso non invertente dell'operazionale serve per compensare le tolleranze dei valori delle LDR.
VANTAGGI
In questo sensore viene aggiunta una fotoresistenza per lato, ma allo stesso tempo viene eliminato il diodo emittente, diminuendo così l'assorbimento di corrente dalla batteria. Inoltre il sensore funziona bene in qualunque situazione luminosa e su qualsiasi superficie riflettente, in quanto il segnale in uscita non dipende dalla luminosità assoluta, ma da quella relativa di una LDR rispetto all'altra.
Un'altra caratteristica degna di nota è che il sensore risulta insensibile alle variazioni della tensione di alimentazione.
- Elettronicaciarma (Link)
Sito fonte di molte informazioni di questa sezione, con utili guide.